作者:陳濤等
來源:
發(fā)布時間:2021-10-14
Tag:
點擊:
[麻專利]劍麻農(nóng)藥噴灑裝置
摘 要:本發(fā)明公開了一種劍麻農(nóng)藥噴灑裝置,涉及劍麻種植機械設備領域,包括行進底座,行進底座為具有履帶行進裝置的底座,行進底座的上面固定設置有機架,機架上面分別設置有藥桶和升降桿;升降桿的頂部設置有噴灑裝置,噴灑裝置上設置有噴頭,噴頭通過管道及水泵與藥桶相互連通。本發(fā)明通過行進底座、機架、藥桶、升降桿以及噴灑裝置的有機結合構成劍麻農(nóng)藥噴灑裝置,通過遠程控制可以在劍麻地中自由穿梭,觀察、噴藥,還能夠根據(jù)具體情況升降、伸縮,以達到劍麻不同角度的農(nóng)藥噴灑效果,解決了現(xiàn)有技術如無人機或者定點噴灑的方式,無法完全覆蓋整個葉片,另外,由于劍麻葉帶有針刺,人工噴灑容易出現(xiàn)事故還很疲勞的問題。
技術要點
1.一種劍麻農(nóng)藥噴灑裝置,其特征在于:包括行進底座(1)、機架(2)、藥桶(3)、升降桿(4)以及噴灑裝置(5);
所述行進底座(1)為具有履帶行進裝置的底座,其內(nèi)部設置有驅動電動機以及控制電路,行進底座(1)的兩側分別設置有履帶;
所述行進底座(1)的上面固定設置有機架(2),所述機架(2)上面分別設置有藥桶(3)和升降桿(4);所述升降桿(4)位于所述機架(2)的中部,所述藥桶(3)設置有多個,分別對稱設置在所述升降桿(4)的兩側;
所述升降桿(4)的頂部設置有所述噴灑裝置(5),所述噴灑裝置(5)上設置有噴頭,所述噴頭通過管道及水泵與所述藥桶(3)相互連通。
2.根據(jù)權利要求1所述的劍麻農(nóng)藥噴灑裝置,其特征在于:
所述機架(2)包括機架本體(20),所述機架本體(20)呈U形結構,其倒扣在所述行進底座(1)上;
所述機架本體(20)的兩側通過合頁固定有機架翼板(21),所述機架翼板(21)的兩側與所述機架本體(20)的可轉動設置有加強連桿(22);所述機架翼板(21)的上面設置有所述藥桶(3)。
3.根據(jù)權利要求2所述的劍麻農(nóng)藥噴灑裝置,其特征在于:所述藥桶(3)為中空圓柱體結構,其內(nèi)放置有鋼珠;
所述機架翼板(21)采用鋁合金材料制成,其底部固定設置有攪拌電機(23);所述攪拌電機(23)的輸出轉軸上設置有十字結構的磁力架,所述磁力架上固定設置有多個永磁體,該永磁體能夠吸引所述鋼珠。
4.根據(jù)權利要求1所述的劍麻農(nóng)藥噴灑裝置,其特征在于:
所述升降桿(4)包括固定套管(40),所述固定套管(40)為中空方形管材制成,其頂部兩側對稱開設有繩孔(400),所述繩孔(400)內(nèi)穿設有拉繩(42);
所述固定套管(40)的外側底部固定設置有卷繩電機(43),所述卷繩電機(43)的輸出轉軸上固定套設有卷繩輪,所述卷繩輪上繞設有所述拉繩(42);
所述固定套管(40)內(nèi)可滑動設置有活動桿(41),所述噴灑裝置(5)固定設置在所述活動桿(41)的頂部。
5.根據(jù)權利要求4所述的劍麻農(nóng)藥噴灑裝置,其特征在于:所述活動桿(41)為方形結構,其與所述固定套管(40)的內(nèi)孔相互對應;
所述活動桿(41)的底部兩側可轉動設置有滑輪(410),所述滑輪(410)呈啞鈴狀,其上繞過所述拉繩(42)。
6.根據(jù)權利要求1所述的劍麻農(nóng)藥噴灑裝置,其特征在于:
所述噴灑裝置(5)包括噴灑底座(50),所述噴灑底座(50)為板狀結構,其上面固定設置有第一轉動噴灑伸縮桿(51)和第二轉動噴灑伸縮桿(52)以及噴桿旋轉驅動電機(53);所述第一轉動噴灑伸縮桿(51)和第二轉動噴灑伸縮桿(52)結構、尺寸完全一致;
所述第一轉動噴灑伸縮桿(51)包括固定轉軸(510),所述固定轉軸(510)上面可轉動設置有旋轉齒輪(511),所述旋轉齒輪(511)上面固定設置有搖臂座(512);所述搖臂座(512)為U形結構,搖臂座(512)外側固定設置有搖臂電機(516),所述搖臂電機(516)的轉軸穿設于所述搖臂座(512);搖臂座(512)內(nèi)設置有搖臂(513),所述搖臂(513)的一端與所述搖臂電機(516)的轉軸固定連接;所述搖臂(513)為中空方管結構,其內(nèi)可伸縮設置有搖臂伸縮桿(515);所述搖臂伸縮桿(515)的端部固定設置有噴頭(517);所述噴桿旋轉驅動電機(53)的輸出轉軸上固定套設有主動齒輪(54);所述主動齒輪(54)與所述旋轉齒輪(511)相互嚙合;所述旋轉齒輪(511)右與第二轉動噴灑伸縮桿(52)的旋轉齒輪相互嚙合。
7.根據(jù)權利要求6所述的劍麻農(nóng)藥噴灑裝置,其特征在于:所述搖臂(513)的另一端上面開設有摩擦輪槽(5130);
所述搖臂(513)上固定設置有搖臂伸縮驅動電機(514),所述搖臂伸縮驅動電機(514)的輸出轉軸上固定設置有摩擦輪(5140),所述摩擦輪(5140)的一部分穿過所述摩擦輪槽(5130)與所述搖臂伸縮桿(515)相互接觸。
8.根據(jù)權利要求6所述的劍麻農(nóng)藥噴灑裝置,其特征在于:所述噴灑底座(50)的底部兩側分別固定設置有一個攝像頭。
9.根據(jù)權利要求1所述的劍麻農(nóng)藥噴灑裝置,其特征在于:
還包括無線通訊模塊,該無線通訊模塊與控制電路板連接,能通過無線電波與遠程控制站無線連接,并根據(jù)遠程控制站的指令執(zhí)行控制命令。
10.根據(jù)權利要求1所述的劍麻農(nóng)藥噴灑裝置,其特征在于:所述藥桶(3)采用塑料材料制成。
技術領域
本發(fā)明涉及劍麻種植機械設備領域,尤其涉及一種劍麻農(nóng)藥噴灑裝置。
背景技術
劍麻又名菠蘿麻,龍舌蘭科龍舌蘭屬,是一種多年生熱帶硬質葉纖維作物,其原產(chǎn)墨西哥,現(xiàn)主要在非洲、拉丁美洲、亞洲等地種植,是當今世界用量最大,范圍最廣的一種硬質纖維。劍麻纖維質地堅韌,耐磨、耐鹽堿、耐腐蝕,廣泛運用在運輸、漁業(yè)、石油、冶金等各種行業(yè),具有重要的經(jīng)濟價值。世界劍麻進出口貿(mào)易在不斷增長,而中國目前自產(chǎn)的劍麻纖維卻不能滿足國內(nèi)的需要,并且隨著劍麻纖維用途的不斷增加,中國每年都在增加劍麻纖維的進口量。同時劍麻還有重要的藥用價值。劍麻種植過程中,會出去病蟲害,由于劍麻的特點是葉片一面朝上,另一面在下,用常見的如無人機或者定點噴灑的方式,無法完全覆蓋整個葉片,另外,由于劍麻葉帶有針刺,人工噴灑容易出現(xiàn)事故還很疲勞。
發(fā)明內(nèi)容
為解決上述問題,本發(fā)明采用如下技術方案實現(xiàn):
一種劍麻農(nóng)藥噴灑裝置,包括行進底座、機架、藥桶、升降桿以及噴灑裝置;
所述行進底座為具有履帶行進裝置的底座,其內(nèi)部設置有驅動電動機以及控制電路,行進底座的兩側分別設置有履帶;這是比較成熟的半成品,可以在市場上采購,不需要過多設計加工即可使用,這樣可以降低設計和制作的成本。
所述行進底座的上面固定設置有機架,機架可以是一塊板材結構,也可以是其他結構,通過螺栓固定在行進底座的上面。所述機架上面分別設置有藥桶和升降桿;所述升降桿位于所述機架的中部,所述藥桶設置有多個,分別對稱設置在所述升降桿的兩側;這樣的結構可以使得整個裝置保持平衡,不容易出現(xiàn)傾覆。
所述升降桿的頂部設置有所述噴灑裝置,所述噴灑裝置上設置有噴頭,所述噴頭通過管道及水泵與所述藥桶相互連通。
優(yōu)選地,所述機架包括機架本體,所述機架本體呈U形結構,其倒扣在所述行進底座上;
所述機架本體的兩側通過合頁固定有機架翼板,這樣的結構可以在運輸過程中折疊機架翼板,使得整個裝置的體積變小,方便攜帶和運輸。所述機架翼板的兩側與所述機架本體的可轉動設置有加強連桿;加強連桿是端部開設有掛孔的桿狀結構,用于加強機架翼板的承重能力。
所述機架翼板的上面設置有所述藥桶。藥桶可以是通過扣設固定,或者利用具有彈性的皮筋進行固定,這樣比較方便拆卸。
優(yōu)選地,所述藥桶為中空圓柱體結構,其內(nèi)放置有鋼珠;
所述機架翼板采用鋁合金材料制成,其底部固定設置有攪拌電機;所述攪拌電機的輸出轉軸上設置有十字結構的磁力架,所述磁力架上固定設置有多個永磁體,該永磁體能夠吸引所述鋼珠。攪拌電機可以采用軸流風機的結構設計,將葉片改成磁力架即可,這樣結構扁平,體積小,方便安裝。攪拌電機與控制電路板連接。工作的時候,攪拌電機帶動磁力架轉動,磁力架上的永磁體帶動藥桶內(nèi)的鋼珠轉動,從而對藥桶內(nèi)的藥液進行攪拌防止沉淀,影響藥效。
優(yōu)選地,所述升降桿包括固定套管,所述固定套管為中空方形管材制成,其頂部兩側對稱開設有繩孔,所述繩孔內(nèi)穿設有拉繩;
所述固定套管的外側底部固定設置有卷繩電機,所述卷繩電機的輸出轉軸上固定套設有卷繩輪,所述卷繩輪上繞設有所述拉繩;
所述固定套管內(nèi)可滑動設置有活動桿,所述噴灑裝置固定設置在所述活動桿的頂部。通過卷繩電機帶動卷繩輪轉動,拉動拉繩在固定套管內(nèi)上下移動,從而帶動活動桿也上下滑動,這樣的結構比較簡單,容易控制。
優(yōu)選地,所述活動桿為方形結構,其與所述固定套管的內(nèi)孔相互對應;
所述活動桿的底部兩側可轉動設置有滑輪,所述滑輪呈啞鈴狀,其上繞過所述拉繩。這樣的結構,可以減小拉繩與活動桿底部的摩擦力,增加拉繩的壽命。
優(yōu)選地,所述噴灑裝置包括噴灑底座,所述噴灑底座為板狀結構,其上面固定設置有第一轉動噴灑伸縮桿和第二轉動噴灑伸縮桿以及噴桿旋轉驅動電機;所述第一轉動噴灑伸縮桿和第二轉動噴灑伸縮桿結構、尺寸完全一致;
所述第一轉動噴灑伸縮桿包括固定轉軸,所述固定轉軸上面可轉動設置有旋轉齒輪,所述旋轉齒輪上面固定設置有搖臂座;所述搖臂座為U形結構,搖臂座外側固定設置有搖臂電機,所述搖臂電機的轉軸穿設于所述搖臂座;搖臂座內(nèi)設置有搖臂,所述搖臂的一端與所述搖臂電機的轉軸固定連接;所述搖臂為中空方管結構,其內(nèi)可伸縮設置有搖臂伸縮桿;所述搖臂伸縮桿的端部固定設置有噴頭;所述噴桿旋轉驅動電機的輸出轉軸上固定套設有主動齒輪;所述主動齒輪與所述旋轉齒輪相互嚙合;
所述旋轉齒輪右與第二轉動噴灑伸縮桿的旋轉齒輪相互嚙合。這樣的結構,可以僅利用一臺電機就可以實現(xiàn)第一轉動噴灑伸縮桿和第二轉動噴灑伸縮桿的轉動控制,二者轉向相反,在劍麻地里升起后可以構成T形結構,對劍麻上面的葉片進行噴灑。想要對劍麻葉片底部噴灑時,可以控制搖臂電機將搖臂向上豎立甚至轉動180度將噴頭朝上即可,這種結構控制簡單,方便操作。
優(yōu)選地,所述搖臂的另一端上面開設有摩擦輪槽;
所述搖臂上固定設置有搖臂伸縮驅動電機,所述搖臂伸縮驅動電機的輸出轉軸上固定設置有摩擦輪,所述摩擦輪的一部分穿過所述摩擦輪槽與所述搖臂伸縮桿相互接觸。通過控制搖臂伸縮驅動電機正反轉,能夠帶動摩擦輪正反轉從而帶動搖臂伸縮桿沿著搖臂伸縮。由于搖臂不需要太多東西,重量很輕,這樣的結構可以滿足伸縮的需求,而且結構簡單方便操作。
優(yōu)選地,所述噴灑底座的底部兩側分別固定設置有一個攝像頭。
優(yōu)選地,還包括無線通訊模塊,該無線通訊模塊與控制電路板連接,能通過無線電波與遠程控制站無線連接,并根據(jù)遠程控制站的指令執(zhí)行控制命令。
優(yōu)選地,所述藥桶采用塑料材料制成。這樣的結構不會影響磁力的穿透。
本發(fā)明通過行進底座、機架、藥桶、升降桿以及噴灑裝置的有機結合構成劍麻農(nóng)藥噴灑裝置,通過遠程控制可以在劍麻地中自由穿梭,觀察、噴藥,還能夠根據(jù)具體情況升降、伸縮,以達到劍麻不同角度的農(nóng)藥噴灑效果,解決了現(xiàn)有技術如無人機或者定點噴灑的方式,無法完全覆蓋整個葉片,另外,由于劍麻葉帶有針刺,人工噴灑容易出現(xiàn)事故還很疲勞的問題。
附圖說明
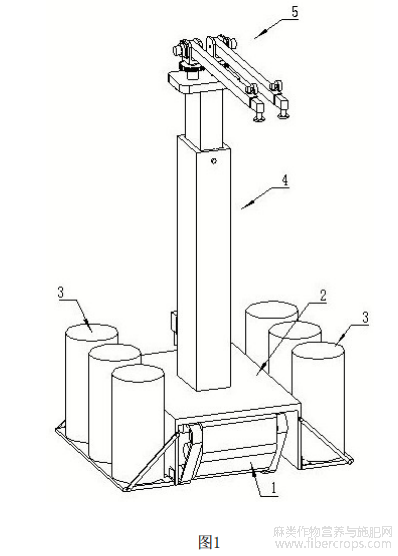
圖1是本發(fā)明提供的實施例總體結構示意圖;
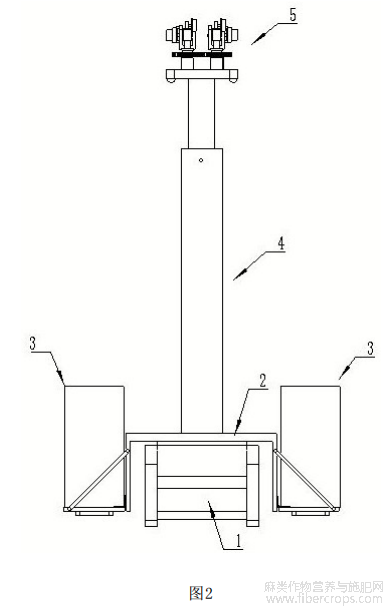
圖2是本發(fā)明提供的實施例主視圖;
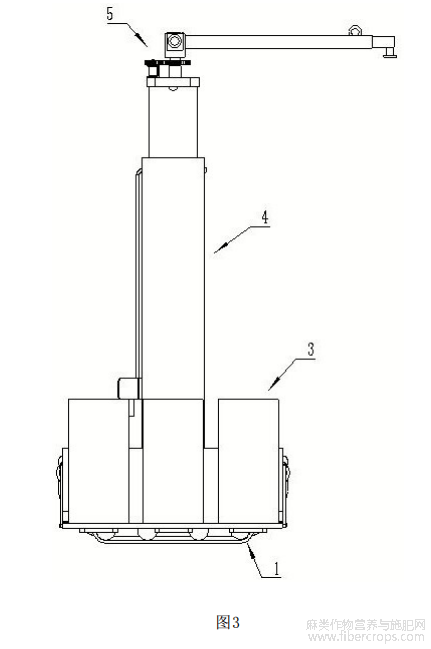
圖3是本發(fā)明提供的實施例左視圖;
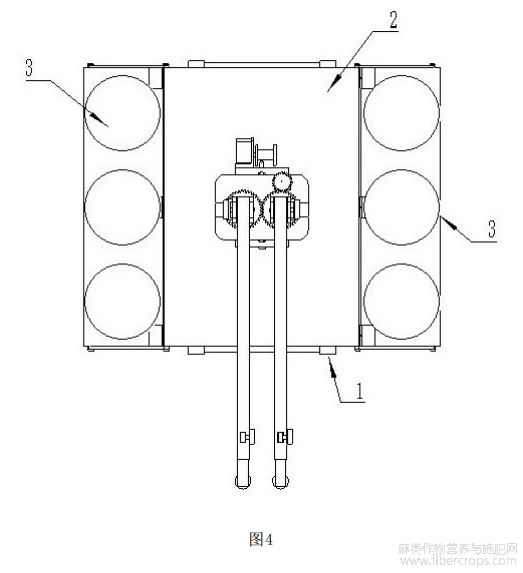
圖4是本發(fā)明提供的實施例俯視圖;
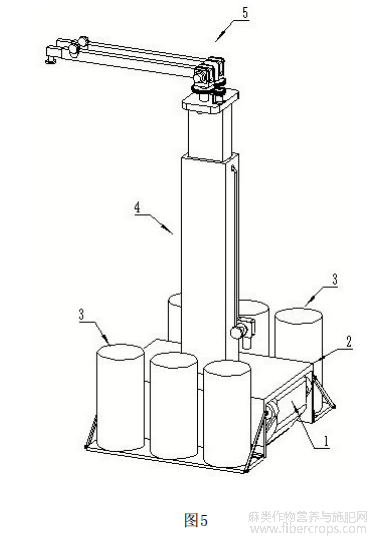
圖5是本發(fā)明提供的實施例另一個視角的立體圖;
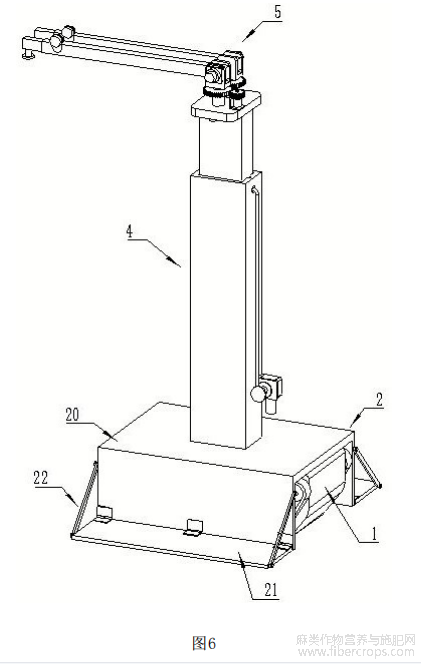
圖6是本發(fā)明提供的實施例拆除藥桶后的示意圖;
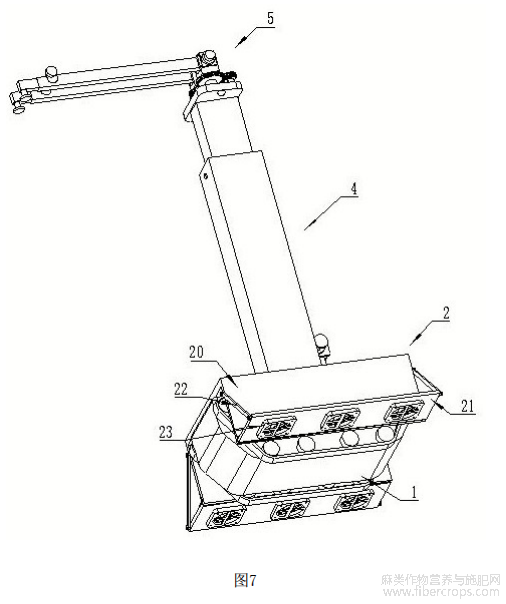
圖7是本發(fā)明提供的實施例拆除藥桶后從底部觀察的示意圖;
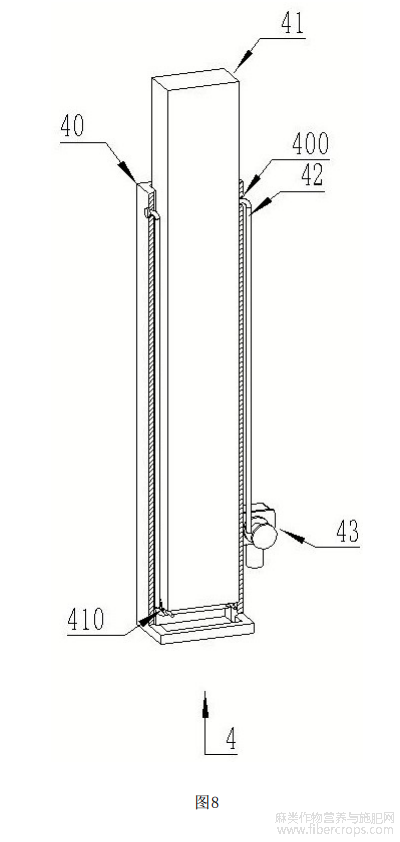
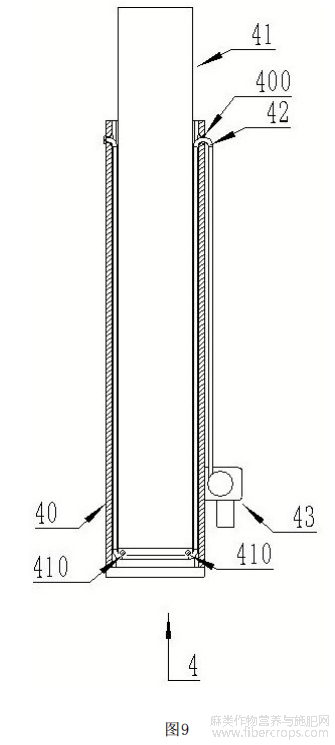
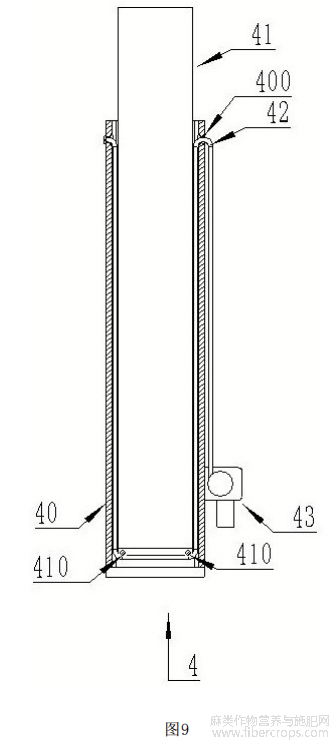
圖8是本發(fā)明提供的實施例中升降桿的剖視圖;
圖9是圖8的主視圖;
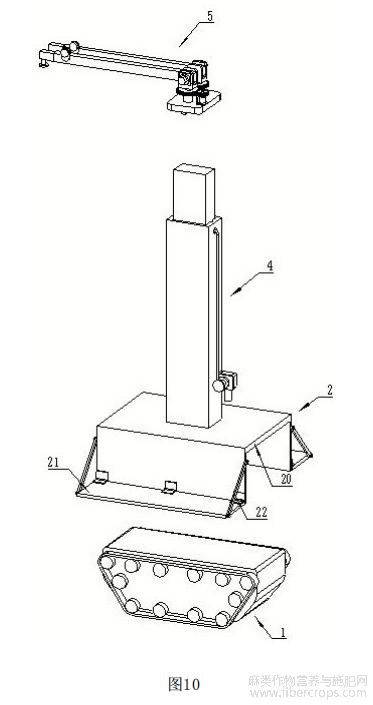
圖10是本發(fā)明提供的實施各個部件的拆解位置圖;
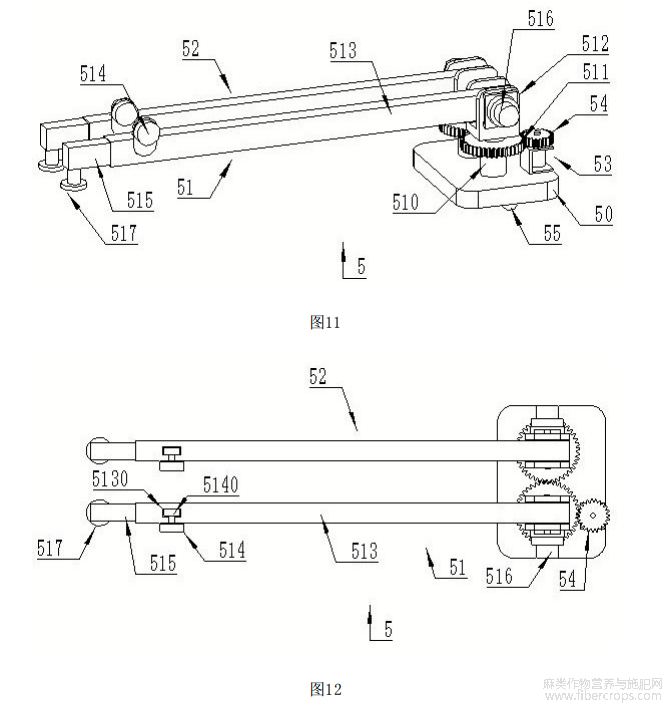
圖11是本發(fā)明提供的實施例中噴灑裝置的立體示意圖;
圖12是本發(fā)明提供的實施例中噴灑裝置的俯視圖。
具體實施方式
為使本申請實施方式的目的、技術方案和優(yōu)點更加清楚,下面將結合本申請實施方式中的圖1~12,對本申請實施方式中的技術方案進行清楚、完整地描述,顯然,所描述的實施方式是本申請一部分實施方式,而不是全部的實施方式。基于本申請中的實施方式,本領域普通技術人員在沒有作出創(chuàng)造性勞動前提下所獲得的所有其他實施方式,都屬于本申請保護的范圍。因此,以下對在附圖中提供的本申請的實施方式的詳細描述并非旨在限制要求保護的本申請的范圍,而是僅僅表示本申請的選定實施方式。在本申請的描述中,需要理解的是,術語“中心”、“縱向”、“橫向”、“長度”、“寬度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“豎直”、“水平”、“頂”、“底”“內(nèi)”、“外”、“順時針”、“逆時針”等指示的方位或位置關系為基于附圖所示的方位或位置關系,僅是為了便于描述本申請和簡化描述,而不是指示或暗示所指的設備或元件必須具有特定的方位、以特定的方位構造和操作,因此不能理解為對本申請的限制。
此外,術語“第一”、“第二”僅用于描述目的,而不能理解為指示或暗示相對重要性或者隱含指明所指示的技術特征的數(shù)量。由此,限定有“第一”、“第二”的特征可以明示或者隱含地包括一個或者更多個該特征。在本申請的描述中,“多個”的含義是兩個或兩個以上,除非另有明確具體的限定。
在本申請中,除非另有明確的規(guī)定和限定,術語“安裝”、“相連”、“連接”、“固定”等術語應做廣義理解,例如,可以是固定連接,也可以是可拆卸連接,或成一體;可以是機械連接,也可以是電連接;可以是直接相連,也可以通過中間媒介間接相連,可以是兩個元件內(nèi)部的連通或兩個元件的相互作用關系。對于本領域的普通技術人員而言,可以根據(jù)具體情況理解上述術語在本申請中的具體含義。
在本申請中,除非另有明確的規(guī)定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接觸,也可以包括第一和第二特征不是直接接觸而是通過它們之間的另外的特征接觸。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或僅僅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或僅僅表示第一特征水平高度小于第二特征。
如圖1~5所示,一種劍麻農(nóng)藥噴灑裝置,包括行進底座1、機架2、藥桶3、升降桿4以及噴灑裝置5。行進底座1為具有履帶行進裝置的底座,其內(nèi)部設置有驅動電動機以及控制電路,行進底座1的兩側分別設置有履帶。這是比較成熟的半成品,可以在市場上采購,不需要過多設計加工即可使用,這樣可以降低設計和制作的成本。
行進底座1的上面固定設置有機架2,機架2可以是一塊板材結構,也可以是其他結構,通過螺栓固定在行進底座1的上面。如圖6和圖7所示,本實施例中優(yōu)選:機架2包括機架本體20,機架本體20呈U形結構,其倒扣在行進底座1上。機架本體20的兩側通過合頁固定有機架翼板21,這樣的結構可以在運輸過程中折疊機架翼板21,使得整個裝置的體積變小,方便攜帶和運輸。機架翼板21的兩側與機架本體20的可轉動設置有加強連桿22。加強連桿22是端部開設有掛孔的桿狀結構,用于加強機架翼板21的承重能力。兩側的機架翼板21的上面分別設置有3個藥桶3。藥桶3可以是通過扣設固定,或者利用具有彈性的皮筋進行固定,這樣比較方便拆卸。藥桶3為中空圓柱體結構,其內(nèi)放置有鋼珠。藥桶3采用塑料材料制成。這樣的結構不會影響磁力的穿透。機架翼板21采用鋁合金材料制成,其底部固定設置有攪拌電機23。攪拌電機23的輸出轉軸上設置有十字結構的磁力架,磁力架上固定設置有多個永磁體,該永磁體能夠吸引鋼珠。攪拌電機23可以采用軸流風機的結構設計,將葉片改成磁力架即可,這樣結構扁平,體積小,方便安裝。攪拌電機23與控制電路板連接。工作的時候,攪拌電機23帶動磁力架轉動,磁力架上的永磁體帶動藥桶內(nèi)的鋼珠轉動,從而對藥桶內(nèi)的藥液進行攪拌防止沉淀,影響藥效。
機架2上面固定設置有升降桿4。升降桿4位于機架2的中部,藥桶3應當分別對稱設置在升降桿4的兩側。這樣的結構可以使得整個裝置保持平衡,不容易出現(xiàn)傾覆。
如圖8和圖9所示,升降桿4包括固定套管40,固定套管40為中空方形管材制成,其頂部兩側對稱開設有繩孔400,繩孔400內(nèi)穿設有拉繩42。固定套管40的外側底部固定設置有卷繩電機43,卷繩電機43的輸出轉軸上固定套設有卷繩輪,卷繩輪上繞設有拉繩42。固定套管40內(nèi)可滑動設置有活動桿41,噴灑裝置5固定設置在活動桿41的頂部。通過卷繩電機43帶動卷繩輪轉動,拉動拉繩42在固定套管40內(nèi)上下移動,從而帶動活動桿41也上下滑動,這樣的結構比較簡單,容易控制。此外,活動桿41為方形結構,其與固定套管40的內(nèi)孔相互對應?;顒訔U41的底部兩側可轉動設置有滑輪410,滑輪410呈啞鈴狀,其上繞過拉繩42。這樣的結構,可以減小拉繩42與活動桿41底部的摩擦力,增加拉繩的壽命。
如圖11和圖12所示,噴灑裝置5包括噴灑底座50,噴灑底座50為板狀結構,其上面固定設置有第一轉動噴灑伸縮桿51和第二轉動噴灑伸縮桿52以及噴桿旋轉驅動電機53。第一轉動噴灑伸縮桿51和第二轉動噴灑伸縮桿52結構、尺寸完全一致。此處僅對其中的第一轉動噴灑伸縮桿51進行詳細介紹。第一轉動噴灑伸縮桿51包括固定轉軸510,固定轉軸510上面可轉動設置有旋轉齒輪511,旋轉齒輪511上面固定設置有搖臂座512。搖臂座512為U形結構,搖臂座512外側固定設置有搖臂電機516,搖臂電機516的轉軸穿設于搖臂座512。搖臂座512內(nèi)設置有搖臂513,搖臂513的一端與搖臂電機516的轉軸固定連接。搖臂513為中空方管結構,其內(nèi)可伸縮設置有搖臂伸縮桿515。搖臂伸縮桿515的端部固定設置有噴頭517。噴桿旋轉驅動電機53的輸出轉軸上固定套設有主動齒輪54。主動齒輪54與旋轉齒輪511相互嚙合。旋轉齒輪511右與第二轉動噴灑伸縮桿52的旋轉齒輪相互嚙合。這樣的結構,可以僅利用一臺電機就可以實現(xiàn)第一轉動噴灑伸縮桿51和第二轉動噴灑伸縮桿52的轉動控制,二者轉向相反,在劍麻地里升起后可以構成T形結構,對劍麻上面的葉片進行噴灑。想要對劍麻葉片底部噴灑時,可以控制搖臂電機516將搖臂向上豎立甚至轉動180度將噴頭朝上即可,這種結構控制簡單,方便操作。
此外,搖臂513的另一端上面開設有摩擦輪槽5130。搖臂513上固定設置有搖臂伸縮驅動電機514,搖臂伸縮驅動電機514的輸出轉軸上固定設置有摩擦輪5140,摩擦輪5140的一部分穿過摩擦輪槽5130與搖臂伸縮桿515相互接觸。通過控制搖臂伸縮驅動電機514正反轉,能夠帶動摩擦輪5140正反轉從而帶動搖臂伸縮桿515沿著搖臂513伸縮。由于搖臂不需要太多東西,重量很輕,這樣的結構可以滿足伸縮的需求,而且結構簡單方便操作。
為了便于操作人員觀察和控制,噴灑底座50的底部兩側分別固定設置有一個攝像頭。還應當設置有無線通訊模塊,該無線通訊模塊與控制電路板連接,能通過無線電波與遠程控制站無線連接,并根據(jù)遠程控制站的指令執(zhí)行控制命令。
工作的時候,操作人員將農(nóng)藥攪拌好放入藥桶3中,并固定在機架2上,然后將裝置放置到劍麻地上。接著通過無線遙控控制裝置的履帶裝置移動進入到劍麻地內(nèi)部,并遙控升降桿4以及噴灑裝置5對劍麻進行噴淋。本發(fā)明通過行進底座1、機架2、藥桶3、升降桿4以及噴灑裝置5的有機結合構成劍麻農(nóng)藥噴灑裝置,通過遠程控制可以在劍麻地中自由穿梭,觀察、噴藥,還能夠根據(jù)具體情況升降、伸縮,以達到劍麻不同角度的農(nóng)藥噴灑效果,解決了現(xiàn)有技術如無人機或者定點噴灑的方式,無法完全覆蓋整個葉片,另外,由于劍麻葉帶有針刺,人工噴灑容易出現(xiàn)事故還很疲勞的問題。
摘自國家發(fā)明專利,發(fā)明人:陳濤,覃旭,彭欣怡,黃顯雅,金剛,吳密,楊祥燕,劉明,崔明勇,陳慶南,陸勇,晏洪鐘,黃尚超,申請?zhí)?/span>202011474917.7,申請日2020.12.15
更多閱讀
文章排行
最新文章
Copyright by Ramie Research Institute of Hunan Agricultural University
湖南農(nóng)業(yè)大學農(nóng)學院/苧麻研究所 版權所有 2009-2016 湘ICP備10006838號-1
